Introduction
In this project, I explored how to perform image recitification, and create panoramas by stitching photos together, both manually and automatically.
Shoot the Photos
I took the pictures in this report with an iPhone 13 Pro. I used AF/AE lock to limit lighting changes in order to make a seamless transition between photos of a moasic. However, for the Ghirardelli picture, I intentially wanted to see how would a lighting difference look in a mosaic.
Recover Homographies
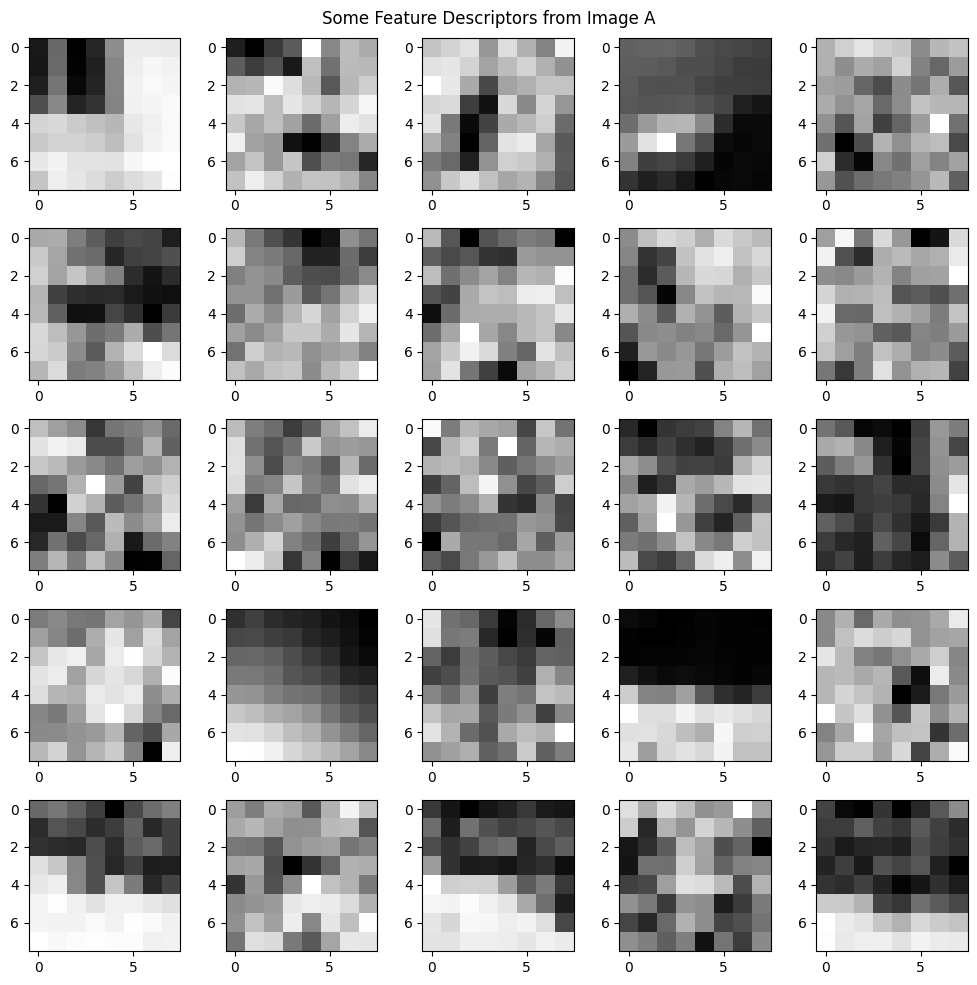
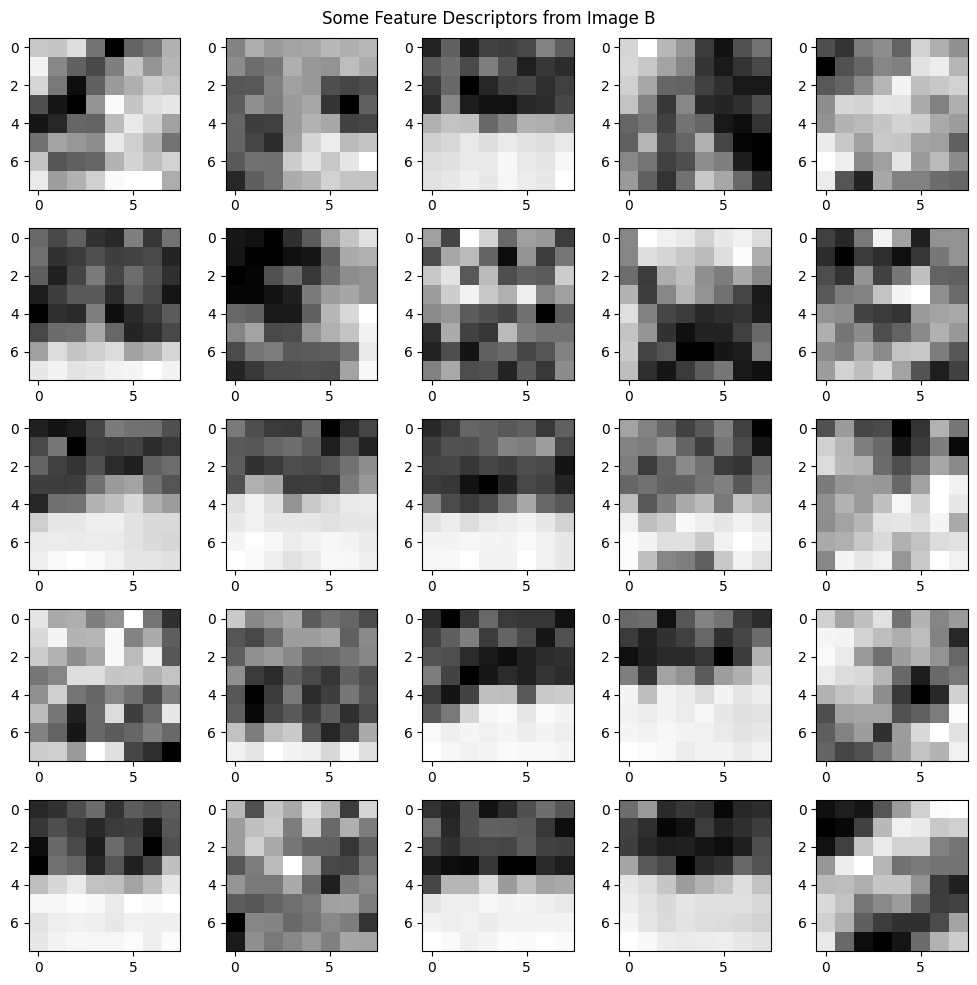
To recover the homography that will be used to warp the entire image, I began by plotting corresponding points between the images in question. These corresponding points
denoted key features that are shared between the images.
Homographies can be defined by 8 points, or 4 pairs of correspondences. However, we can use more than 4 pairs of correspondences to solve for the homography by using least squares.
Least squares minimizes the error that is caused by slightly misaligned correspondences; thus, giving us a better solution.
The following is how I mathematically calculated the homography.
\[ \begin{bmatrix} x_1 & y_1 & 1 & 0
& 0 & 0 & -x'_1 x_1 & -x'_1 y_1 \\
0 & 0 & 0 & x_1 & y_1 & 1 & -y'_1 x_1 &
-y'_1 y_1 \\
x_2 & y_2 & 1 & 0 & 0 & 0 & -x'_2 x_2 &
-x'_2 y_2 \\
0 & 0 & 0 & x_2 & y_2 & 1 & -y'_2 x_2 &
-y'_2 y_2 \\ & & & & \vdots\end{bmatrix}
\begin{bmatrix} a \\ b \\ c \\ d \\ e \\ f \\ g \\ h
\end{bmatrix} =
\begin{bmatrix}
x'_1 \\ y'_1 \\ x'_2 \\ y'_2 \\ \vdots
\end{bmatrix}
\]
Using least squares yield us the variables a through h. Allowing us to get to the following:
\[
H = \begin{bmatrix} a & b &
c \\ d & e & f \\ g & h & 1
\end{bmatrix}
\]
Now we can use the recovered homography, and warp the entire image.
\[
\begin{bmatrix} x' \\ y' \\ w
\end{bmatrix} = \begin{bmatrix} h_1 & h_2 & h_3 \\ h_4 & h_5
& h_6 \\ h_7 & h_8 & 1 \end{bmatrix} \begin{bmatrix} x \\ y
\\ 1 \end{bmatrix}
\]
It is important to note to divide the result by w to recover
the transformed coordinates.
Image Rectification
An applicaton of applying homographies, or tranforming an image with a perspective warp, is to rectify an image, which has wide use throughout computer vision and photography, such as creating panoramas.

Blending the Images into a Mosaic
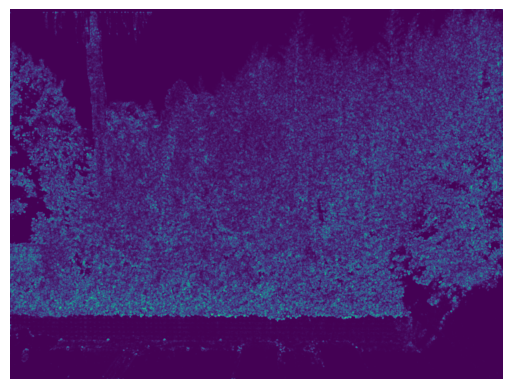
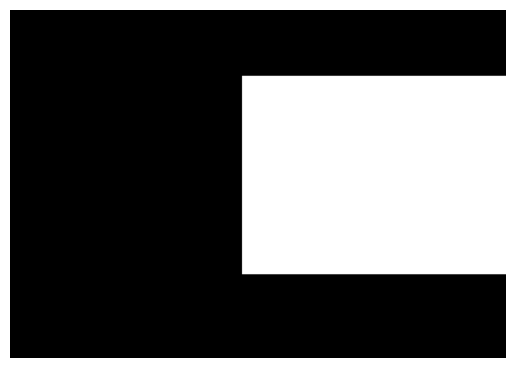
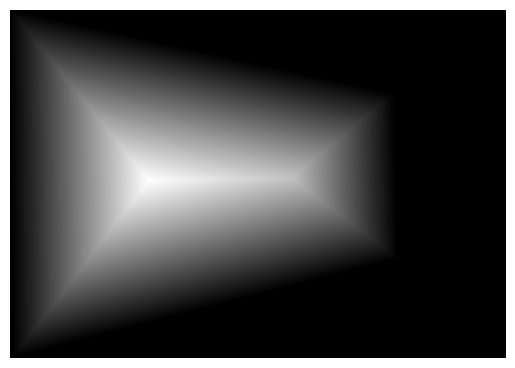
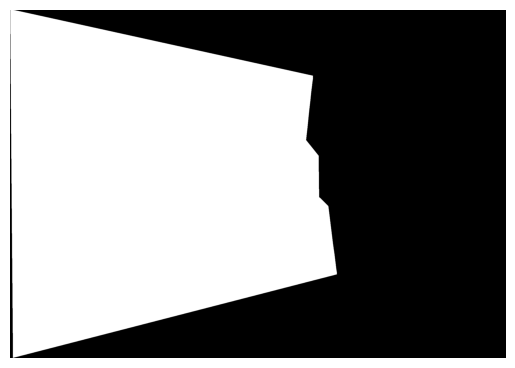
I began by plotting more than 4 corresponding points, so I can do error minimization using least squares. From there I warped the image to the picture I wanted to stay fixed. I was then able to calculate the bounding box for the mosaic using the offsets from the warp. I also created binary masks of each image with respect to the mosaic space. To create more of a seamless transition, I did a distance transform on the masks. I used the distance transform to find the alpha mask, which I then used to blend the images using a Laplacian stack.

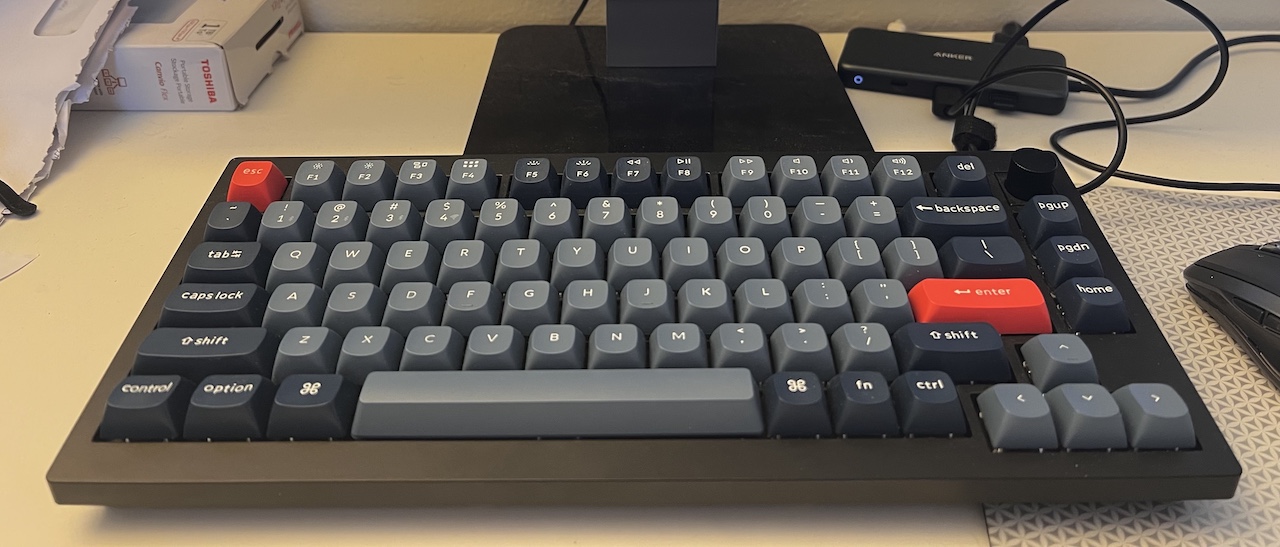
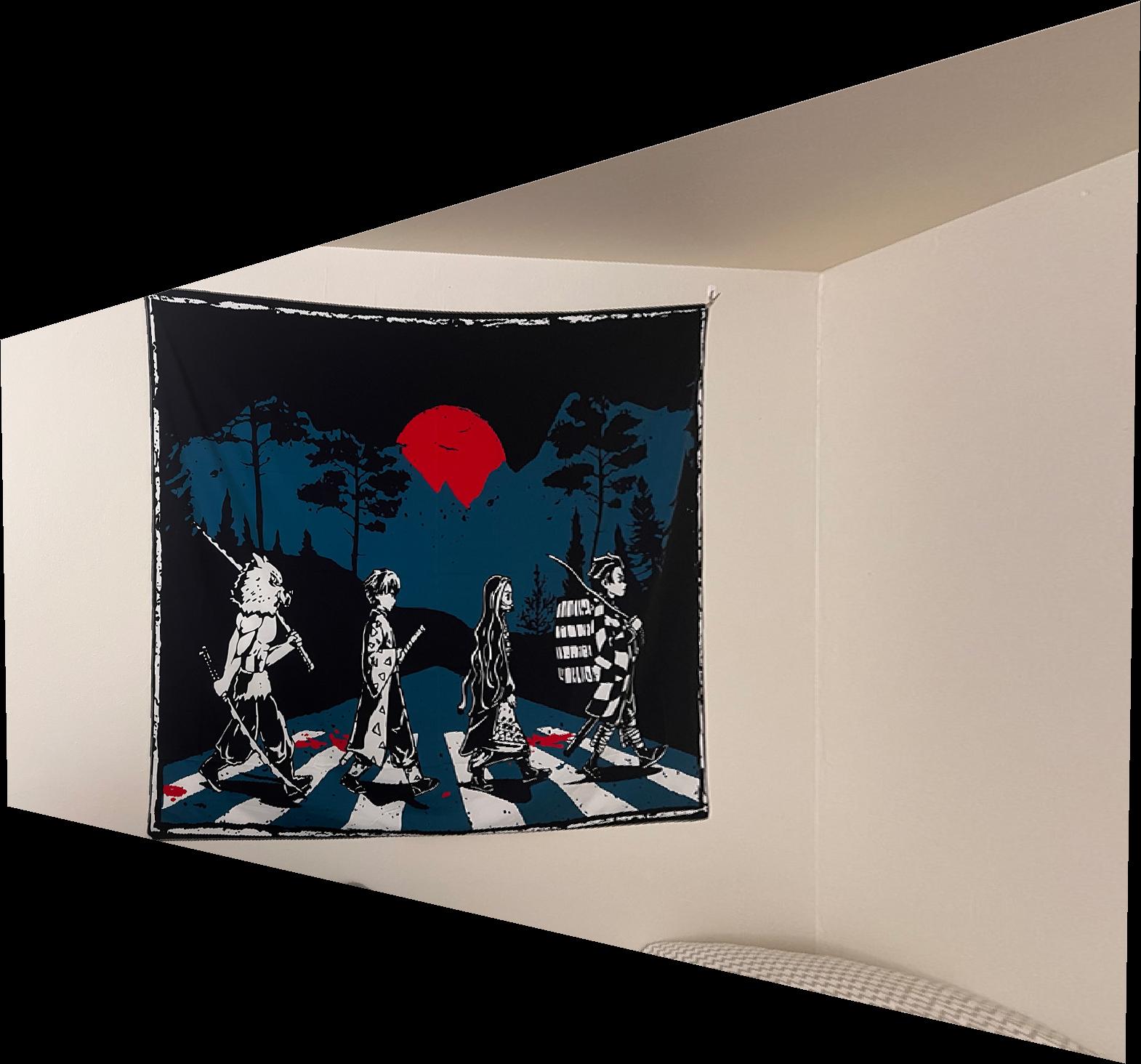
Image to warp

Fixed Image

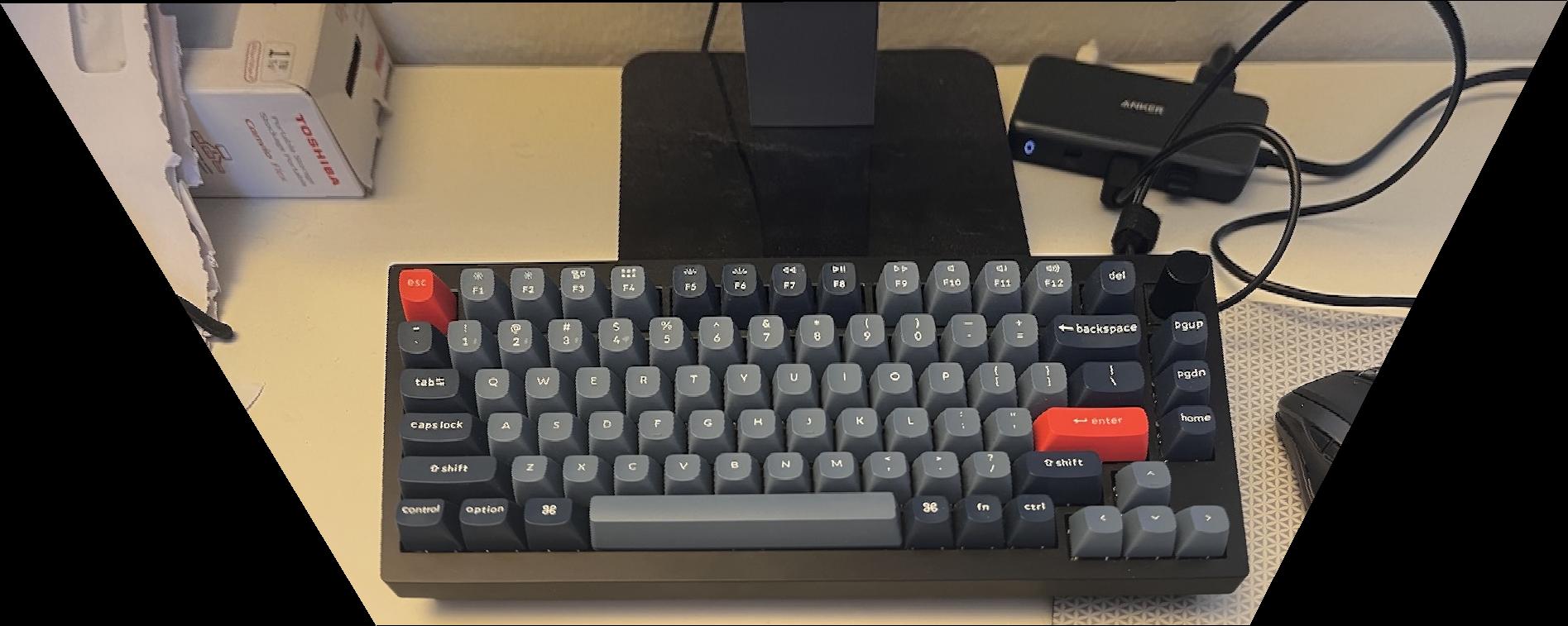
Warped Image in Mosaic Space

Fixed Image in Mosaic Space
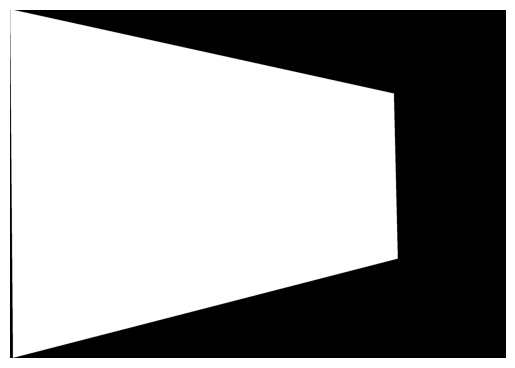
Warped Image Mask
Fixed Image Mask
Distance Transform of Warped Image Mask
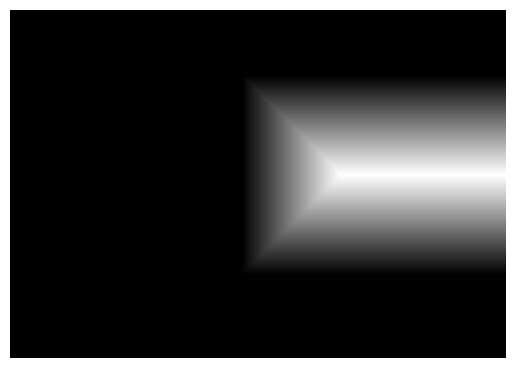
Distance Transform of Fixed Image Mask
Alpha Mask

Final Result
Final Results of Manual Panoramic Creation

Left

Right

Final
There is a little misalignment as seen on wall of the building and in the steam

Left

Right

Final
There is a strong seamline possibly due to the lighting. The difference in color can be seen in the roof of the building
This is even with 4 layers and a sigma of 5 for blending.
Left
Right